PoC - Controlar un AMux con la señal EoS del SAR ADC PSoC5LP
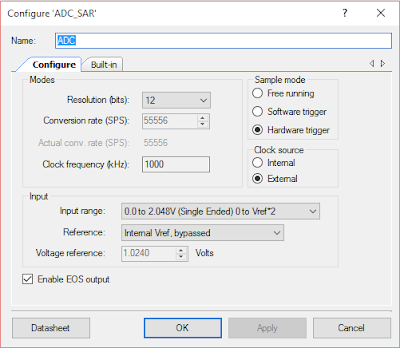
El proposito de este proyecto es controlar las entradas del AMuxHw empleando solamente señales generadas por el hardware interno del PSoC5LP. En este caso lo hice usando una señal que veo poco en los foros de Cypress, es el EoS (End of Sample), cuando esta señal presenta un flanco de subida nos indica que el canal del ADC fue sampleado, pero ¿Por que no usar la señal EoC (End of Convertion)?, como su nombre lo indica, el EoC presenta un flanco de subida cuando la conversion fue terminada, es decir el valor analogo presente en el pin del ADC fue convertido a su valor binario equivalente. Entonces ¿Por que usar el EoS?, como ya vimos la señal EoS presenta un flanco de subida cuando termino el sampleo del canal del ADC, es decir, la diferencia entre la señal EoC y EoS es el tiempo que tarda el ADC en la conversión de analogo a binario, con esto en mente, podemos cambiar la entrada del AMuxHw tenemos la señal EoS, esta entra a trabajar funcionando como clock para un BasicCounter q